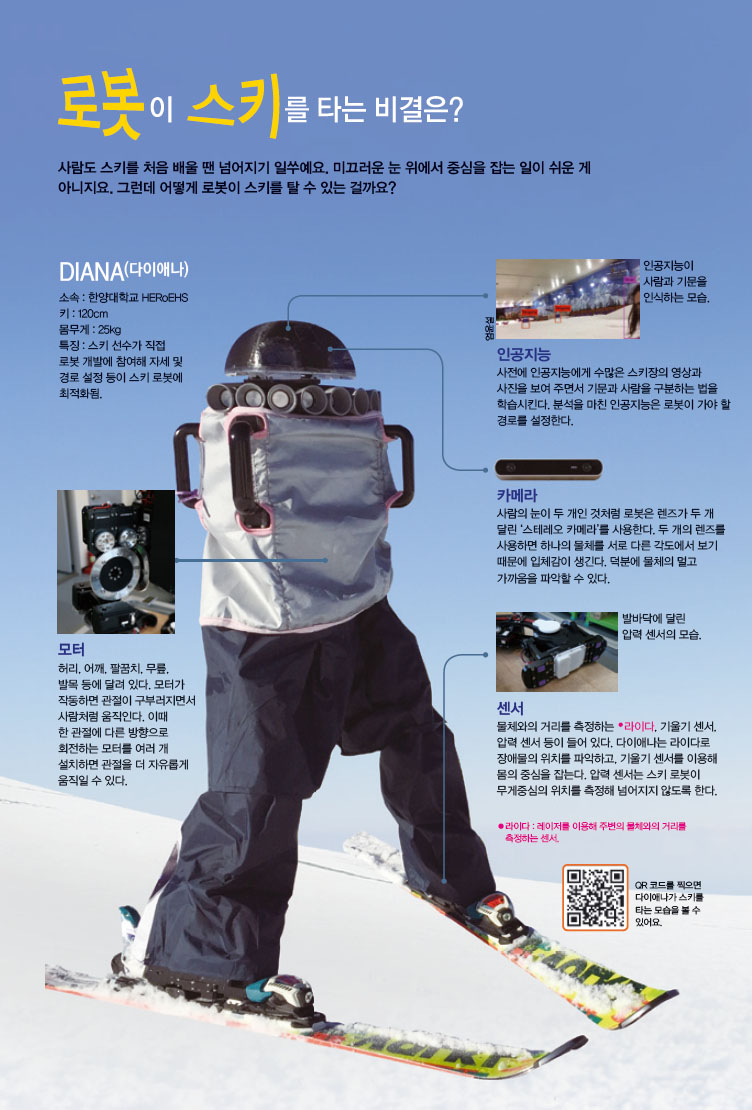
사람도 스키를 처음 배울 땐 넘어지기 일쑤예요. 미끄러운 눈 위에서 중심을 잡는 일이 쉬운 게 아니지요. 그런데 어떻게 로봇이 스키를 탈 수 있는 걸까요?
최초의 휴머노이드는 일본 와세다대학교 가토 이치로 교수팀이 1973년에 만든 ‘와봇 1호’예요, 두 발로 걸을 수는 있었지만 몇 걸음이 고작이었지요. 이후 30년이 지나서야 두 다리로 자연스럽게 걷는 로봇인 ‘아시모’가 만들어졌답니다. 로봇이 걷는 것도 어려운데, 스키는 어떻게 타는 걸까요?
스키를 타는 사람이 방향을 돌릴 때엔 무게중심을 이용해요. 오른쪽으로 돌고 싶으면 오른쪽 무릎을 굽히면서 허리를 오른쪽으로 틀지요. 그러면 무게중심이 오른쪽으로 이동하기 때문에 넘어지지 않고 방향을 돌릴 수 있답니다.
스키 로봇도 이와 비슷한 원리로 스키를 타요. 눈의 역할을 하는 카메라와 뇌를 담당하는 인공지능, 감각 기관을 대신하는 센서, 몸을 움직이는 모터 등을 이용하지요. 카메라가 영상을 찍으면 이를 인공지능이 분석해서 최적의 경로를 만들어요. 그러면 관절에 달린 모터를 움직여서 무게중심을 이동해 방향을 돌리고, 압력, 기울기 센서를 통해 넘어지지 않도록 중심을 잡지요. 이 모든 과정이 0.005~0.008초마다 한 번씩 연속적으로 이뤄진답니다.
# 아직 스키 로봇의 움직임은 완벽하지 않아요. 하지만 연구가 계속된다면 가까운 미래에는 로봇과 사람이 스키 시합을 벌일 날도 오지 않을까요? 앞으로 계속될 스키 로봇의 도전을 함께 기대해 봐요~.
▼관련기사를 계속 보시려면?